Автоматическая система регулирования температуры
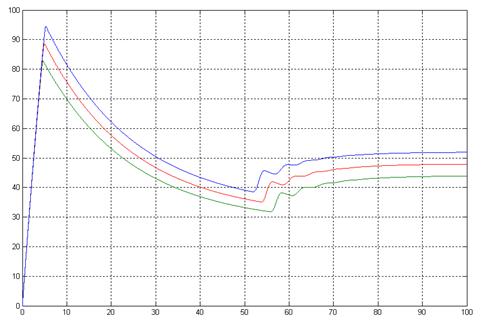
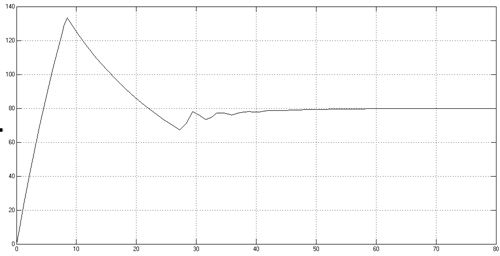
Переходные процессы для выходной переменной (+10%,+20%,+30%)
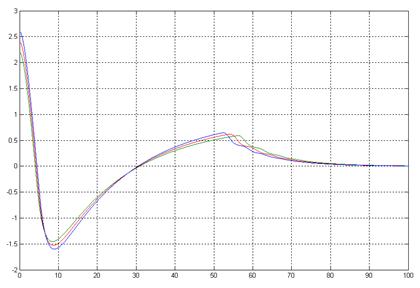
Переходные процессы для ошибки (+10%,+20%,+30%)
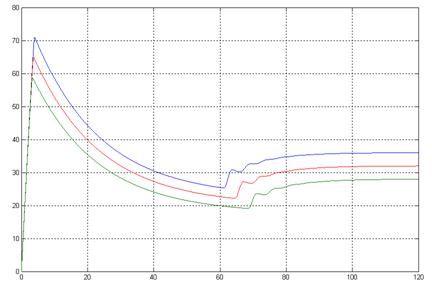
Переходные процессы для выходной переменной (-10%,-20%,-30%)
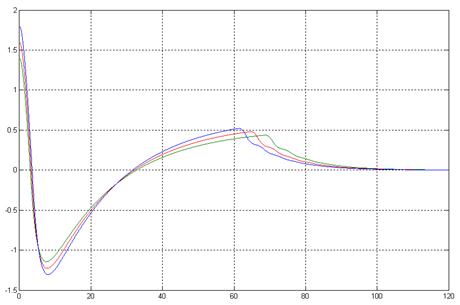
Пе
реходные процессы для ошибки (-10%,-20%,-30%)
4.3 Статические характеристики системы
Зависимости выходной переменной от возмущающего воздействия при трех значениях задающего воздействия:
Uз=2В Uз=4В
Uз=6В
4.5 Сравнение результатов моделирования с помощью составленной программы и с помощью типовых программных средств
При сравнении переходных процессов по ошибке и возмущающему воздействию, а также статических характеристик системы, полученных с помощью написанной программы и имитационной среды Simulink, можно сделать вывод, очевидно, что графики практически полностью совпадают. Небольшие различия обусловлены лишь различным шагом расчетов.
5. ДОПОЛНИТЕЛЬНОЕ ИССЛЕДОВАНИЕ СИСТЕМЫ
5.1 Влияние напряжения питающей сети на процессы регулирования температуры
Рассмотрим переходные процессы при одном и том же напряжении задания 4В и температуре окружающей среды 25С:
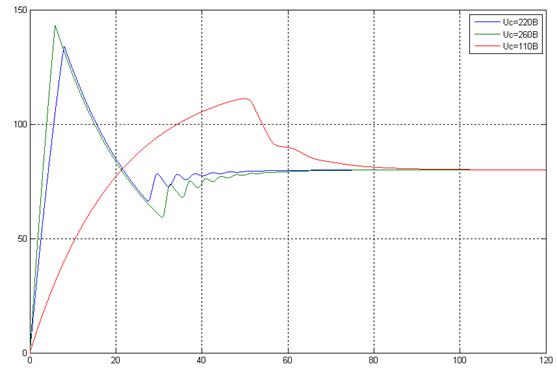
Как видно по переходному процессу, при увеличении напряжения питающей сети увеличивается перерегулирование, инерционность увеличивается незначительно. При уменьшении напряжения питания в 2 раза (например, отказ одного тиристора) перерегулирование резко снижается, но сильно увеличивается время регулирования.
5.2 Изменение свойств системы при использовании вместо ПИ регулятора П-, ПД- и ПИД-регулятора
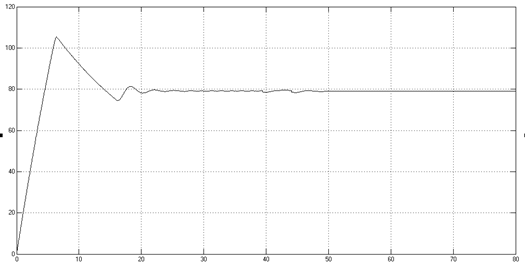
ПИ-регуляор(исходный):
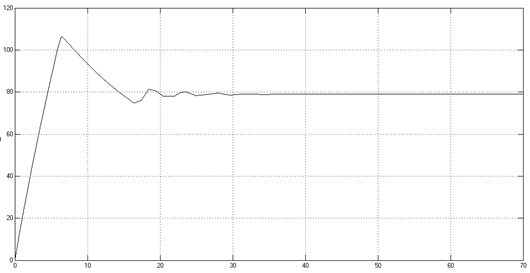
ПД-регулятор (Kp=20.39, Kd=2):
Применение ПД-регулятора позволило уменьшить величину перерегулирования и значительно сократить время регулирования, однако появилась установившаяся ошибка, для данного задания равная 1ºС.
П-регулятор (Кр=20.39):
Применение данного регулятора немного увеличило перерегулирование, однако время регулирования уменьшилось, даже по сравнению с ПД-регулятором.
ПИД-регулятор (Kp=20.39, Kи=10; Kd=2):
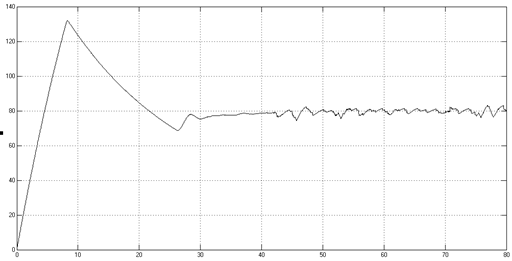
ПИД-регулятор немного уменьшил перерегулирование, при этом время регулирования осталось прежним и появился большой разброс регулируемой величины в установившемся режиме.
5.3 Работа системы при использовании релейного двухпозиционного регулятора
Двухпозиционное реле с гистерезисом (ширина гистерезиса -0.01,0.01, высокий уровень С=1.5, низкий уровень = 0) :
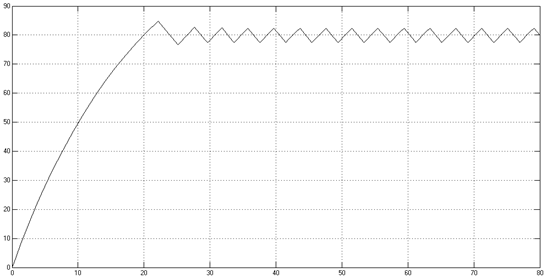
Применение данного регулятора допустимо в том случае, если допустимо отклонение регулируемой величины в довольно широком диапазоне. Данный регулятор обеспечивает приемлемое время регулирования, при большой амплитуде автоколебаний, что компенсируется простотой изготовления такого вида регуляторов.
ВЫВОДЫ
Автоматическая система регулирования температуры при данных параметрах устойчива. Качество процессов регулирования в системе можно увеличить путем изменения параметров системы (в частности параметры Кр, Тр), их оптимизации. Например, при уменьшении общего коэффициента передачи системы уменьшается амплитудное значение сигнала на выходе (выброс) и уменьшается перерегулирование. Так же есть возможность управлять временем установления выходной величины на требуемый уровень
В ходе выполнения курсовой работы были получены статические и динамические характеристики системы регулирования, произведена оптимизация параметров регулятора. Также проводилось исследования работы системы при различных возмущающих воздействиях, задающего воздействия и при влиянии других параметров ( напряжение питания сети, параметров регулятора). Проанализирована работа системы при использовании вместо ПИ-регулятора других типов (П, ПД, ПИД), а также двухпозиционного реле.
Моделирование системы позволяет достаточно точно определять свойства системы, ее поведение при различных значениях входного и возмущающего воздействия и с помощью оптимизации найти наилучшие значения ее параметров.
Список использованной литературы:
1. Моделирование и расчет автоматических систем управления: С.И. Малафеев, А.А. Малафеева. Учебное пособие / «Посад» 2003;
2. Андриевский Б.Р., Фрадков А.Л. Элементы математического моделирования в программных средах MATLAB5 и Scilab. - С.Пб.: Наука, 2001.
3. Горлов В.Н., Малафеев С.И. Основы вычислительных методов. – Владимир, ВлГУ, 1997.
4. Малафеев С.И., Малафеева А.А. Системы автоматического управления. – Владимир, ВлГУ, 1998.
5. Баранов Г.Л., Макаров А.В. Структурное моделирование сложных динамических систем. – Киев: Наукова думка, 1986
6. Холодниок М., Клич А., Кубичек М., Марек М. Методы анализа нелинейных динамических моделей / Пер. с чешск. – М.: Мир, 1991.
Размещено на Allbest.ru
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности