Виды девиации магнитного компаса
на высоких скоростях начинают проявляться эффекты центробежной и кориолисовой сил инерции, вызывающие дополнительные погрешности гирокомпаса;
для устранения инерционных погрешностей путем регулирования параметров гирокомпаса считалось необходимым значительно увеличить габариты его чувствительного элемента и комплектацию вспомогательных приборов.
Такие крупногабаритные гирокомпасы действ
ительно были созданы, но при этом встретились почти непреодолимые трудности в их балансировке и изоляции от внешних возмущений и эффектов инерции собственных масс гирокомпаса. Такие гирокомпасы непригодны для малых объектов.
Таким образом, на первый взгляд, гирокомпас не может найти применения на новых быстроходных транспортных судах (судах на подводных крыльях и на воздушной подушке), а в будущем — на подводном транспортном флоте.
Однако перечисленные выше недостатки присущи только «классическому» типу гирокомпаса, применяющемуся в настоящее время на нашем флоте.
При изменении режима движения судна, к которому следует отнести маневры — изменения скорости, курса или выполнение циркуляции, в показаниях гирокомпасов возникают погрешности, называемые обычно инерционными девиациями. Их возникновение является следствием влияния на чувствительный элемент прибора моментов сил инерции от возникающих при маневрировании линейных ускорений. Многообразие инерционных воздействий и невозможность достаточно точного учета возникающих ускорений определяют сложность математических расчетов и получения конечных выражений для величин инерционных девиаций, что в свою очередь создает нередко непреодолимые трудности в их учете и устранении из показаний гирокомпаса. Поэтому применяется наиболее оправданный в подобных случаях метод оптимального расчета прибора, при котором удается получить такие его свойства, когда возникающие погрешности не будут превосходить заранее установленных техническими условиями пределов. Для судоводителей крайне важно понять характер возникновения погрешностей и те меры, которые могут быть применимы для их устранения.
Если выполняется условие апериодических переходов (т. е. судно находится в расчетной широте или гирокомпас апериодический и произведена нужная регулировка), то направление главной оси гирокомпаса во время маневра изменения скорости, все время совпадает с мгновенным значением скоростной девиации v и никакой другой погрешности, кроме этой, в его показаниях не возникает.
Инерционная девиация II рода возникает в показаниях гирокомпаса при маневрировании судна вследствие воздействия сил инерции на гидравлический успокоитель.
При этом в успокоителе появляется избыток жидкости в каком-либо сосуде, который в свою очередь приводит к возникновению инерционной девиации.
В чистом виде инерционная девиация II рода возникает либо у апериодического гирокомпаса, или, если компас неапериодический, то при маневрировании в расчетной широте. В широтах, отличных от расчетной, в показаниях гирокомпаса возникают одновременно инерционные девиации I и II рода.
Для предотвращения появления инерционной девиации ІІ рода в некоторых конструкциях двухгироскопных компасов применяют специальные устройства — выключатели затухания, перекрывающие на время маневра соединительную трубку сосудов успокоителя.
Как правило, двухгироскопные гирокомпасы, находящиеся в эксплуатации па судах морского флота, являются неапериодическими и, кроме того, в комплекте гирокомпаса отсутствует прибор управления выключателем затухания. Это означает, что в общем случае при маневрах в показаниях гирокомпаса будет возникать одновременно инерционная девиация I и II рода. Таким образом, судоводителю следует считаться с тем, что показания гирокомпаса в течение некоторого интервала времени после завершения маневра будут неточны вследствие существования суммарной инерционной девиации j.
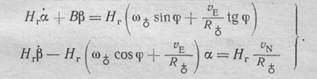
Когда судно начинает движение, то в показаниях маятниковых гирокомпасов появляется погрешность, которая называется скоростной девиацией. Уравнение движения чувствительного элемента гирокомпаса в случае, когда судно движется с постоянной скоростью vс и на постоянном курсе ИК, можно получить в следующем виде:
Поскольку существуют таблицы суммарной инерционной девиации рассчитанные в соответствии с приближенной теорией гирокомпаса и, так как каждый конкретный чувствительный элемент имеет в пределах заводских допусков определенное отклонение своих параметров от их стандартного значения, то не имеется достаточных оснований для прямого использования таблицы для расчета поправки гирокомпаса.
Однако качественная картина возникновения и развития во времени суммарной инерционной девиации должна приниматься судоводителем в расчет.
С целью уменьшения влияния суммарной инерционной девиации на точность судовождения можно предложить следующие рекомендации:
1) поправку гирокомпаса определять либо на стоянке судна, либо когда оно 1,5—2 ч следует с неизменной скоростью и постоянным курсом;
2) после маневра судна, связанного с поворотом на новый курс, сличить показания магнитного и гироскопического компасов сразу после окончания поворота с тем, чтобы определить величину новой поправки магнитного компаса на тот случай, если гирокомпас выйдет из строя. Повторить сличение показаний гирокомпаса и магнитного компаса через 1,5—2 ч после маневра и полученное значение поправки магнитного компаса считать уточненным и принимать это значение в последующем;
3) в течение полутора-двух часов после маневра не следует определять место судна по пеленгам двух предметов. В случае необходимости такого определения полученное место судна нельзя считать достоверным. При определении места судна по пеленгам трех предметов необходимо пеленгование выполнять как можно быстрее (в течение 1—2 мин) с тем, чтобы все пеленги содержали ошибку примерно одной и той же величины, которую затем надо исключить известным из навигации способом. Лучше всего в рассматриваемом случае определять место судна способами, не связанными с пеленгованием;
4) способ уничтожения и определения девиации магнитного компаса по сличению с гирокомпасом при условии, что судно совершает повороты, имея линейную скорость, следует считать приближенным.
При развороте судна на месте (например, с помощью буксиров) инерционная девиация в показаниях гирокомпаса не возникает и указанный способ становится более точным.
Следует помнить, что эти рекомендации имеют смысл только в том случае, если при маневре vN имеет величину не менее 5 узлов.
Для компенсации скоростной погрешности V к гирокомпасу присоединяют специальное устройство — корректор. Корректор имеет два диска, наложенных один на другой (рис. 37). Нижний диск, соединенный со следящей системой гирокомпаса, строго ориентирован относительно гиросферы. Его паз П расположен по оси ОЕК гиросферы. При повороте судна следящая система гирокомпаса возвращается в согласованное с гиросферой положение, а паз нижнего диска будет всегда направлен на восток гиросферы независимо от возможного изменения курса судна. Верхний диск, наложенный на нижний, соединен с последним в точке А штырем особой конструкции, укрепленным с нижней стороны верхнего диска на расстоянии О1А =Rowo от центра этого диска.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск