Исследование рабочих процессов в рулевом приводе автомобилей
Максимальная скорость относительного перемещения трущихся деталей зависит от параметров и кинематики рулевого привода и может быть определена по рекомендации Фоллерта Людера:
|
|
(23) |
где ![]() - угловая скорость вращения шарового пальца;
- угловая скорость вращения шарового пальца;
 - максимальная амплитуда отклонения.
- максимальная амплитуда отклонения.
Результаты расчёта относительной скорости скольжения шарового пальца в наконечнике для рассматриваемых условий приведены в таблице 1.
В этих условиях особую важность приобретает оптимальная жёсткость осевой пружины рулевого шарнира, которая должна превышать инерционные усилия, возникающие от массы рулевых тяг при движении с колебаниями.
3. Исследование зависимости изменения схождения управляемых колёс от упругости, зазоров в сопряжениях и усилия в рулевом приводе
Изменение схождения управляемых колёс происходит под действием среднеэксплуатационных нагрузок с интенсивностью, которая зависит от его первоначальной величины. Оно вызвано смещениями в кинематической цепи рулевого привода, которые формируются за счёт упругости деталей и подвижных сопряжении РП с одной стороны и зазорами, вызванными износом и деформацией элементов подвижных сопряжении, а также ослаблением креплений и потерей прочности деталей РП с другой. Изменение величины первоначального схождения колёс проявляется взаимными относительными смещениями звеньев кинематической цепи рулевого привода, которые могут быть приведены к приращению расстояния между дисками управляемых колёс. Процесс формирования смещений в РП рассмотрим в виде схемы, где изображена плоская модель рулевого привода автомобилей рассматриваемого класса. Исследуем вначале этот процесс при допущении, что в рулевом приводе действует усилие 30 даН, достаточное для выбора зазоров и начала деформации РП. При этом, изменение схождения происходит только под действием упругости и зазоров, остальные факторы можно считать постоянными. Тогда, согласно обозначениям (рис. 3) схождение, измеренное как разность расстояний между заокраинами дисков управляемых колёс впереди и сзади передней оси на высоте центров колёс, равно:
|
|
(24) |
Угол схождение управляемых колес можно выразить:
|
|
(25) |
где Срп - суммарная упругость элементов рулевого привода, мм/даН; Dрп - суммарная величина зазоров в сопряжениях РП, приходящаяся на единицу приложенного усилия при замере, мм/даН. ![]() - коэффициент приведения к высоте центров колёс, учитывающий измерение смещений на высоте РП. ВАЗ, АЗЛК -
- коэффициент приведения к высоте центров колёс, учитывающий измерение смещений на высоте РП. ВАЗ, АЗЛК - ![]() =1,25, ГАЗ-
=1,25, ГАЗ-![]() = 1,30;
= 1,30; ![]() - коэффициент пропорциональности между величинами схождения, измеренными по разности расстояний и углу поворота управляемых колёс.
- коэффициент пропорциональности между величинами схождения, измеренными по разности расстояний и углу поворота управляемых колёс.
ВАЗ (АЗЛК) - ![]() = I4·I0-4 рад = 0,08° = 4,8 мин; ГАЗ -
= I4·I0-4 рад = 0,08° = 4,8 мин; ГАЗ - ![]() = 13,2 I0-4 рад = 0,075° == 4,5 мин.
= 13,2 I0-4 рад = 0,075° == 4,5 мин.
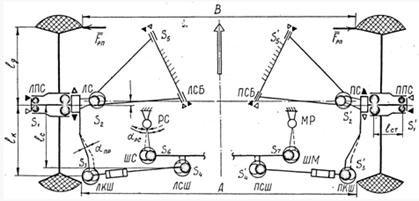

Рис. 3 Схема формирования смещений в кинематической цепи рулевого привода автомобилей с независимой передней подвеской с обозначением подвижных сопряжении и зазоров в них.
Коэффициент ![]() показывает, что смещение в РП на I мм соответствует углу поворота одного управляемого колеса для моделей ВАЗ на 9,6 мин (0,16°) при условии, что второе колесо неподвижно. Величины обоих коэффициентов зависят от углов установки управляемых колёс, конструктивных особенностей рулевого привода и передней подвески, шин и давления воздуха в них.
показывает, что смещение в РП на I мм соответствует углу поворота одного управляемого колеса для моделей ВАЗ на 9,6 мин (0,16°) при условии, что второе колесо неподвижно. Величины обоих коэффициентов зависят от углов установки управляемых колёс, конструктивных особенностей рулевого привода и передней подвески, шин и давления воздуха в них.
В дальнейшем исследовании будет использована величина схождения, измеренная по разности расстояний между дисками колёс на высоте рулевого привода (представляет удобство для экспериментальных исследований), т.к. она изменяется на двойную величину смещений в РП:
|
|
(26) |
|
|
(27) |
|
|
(28) |
Знак и величина второго слагаемого зависимостей (24) - (27) определяется величиной и направлением усилия в рулевом приводе, которое вызвано действием моментов на управляемых колёсах и может быть приведено к усилию, приложенному к дискам управляемых колёс в месте измерения величины схождения (рис.3). Подвижные сопряжения рулевого привода находятся на разном расстоянии от заокраин дисков управляемых колёс, между которыми измеряется схождение, поэтому смещения в них должны быть приведены к радиусу диска колеса. Методика приведения и ранжирование коэффициентов изложена автором
|
|
(29) |
где, согласно обозначениям на схеме рулевого привода (рис. ):
|
|

Процесс изменения схождения управляемых колёс по зависимости (29) моделировался на ЭВМ "НАИРИ-2" путём перебора задаваемых значений упругости и зазоров в отдельных сопряжениях РП, допустимые величины которых взяты из инструктивных материалов автомобильных заводов, а также работ и приведены в таблице 2. Моделирование показало, что суммарное действие допустимых величин перечисленных параметров при усилии в РП до 50 даН может вызвать смещение в кинематической цепи рулевого привода до 10,68 мм, т.е. изменить схождение на величину, в 3-5 раз большую начального значения, и вызвать поворот управляемых колёс до 150·10-4 рад (0,85°) каждое. Однако линейный характер зависимости (29) вносит существенную погрешность в оценку влияния зазоров в сопряжениях, упругости и усилия в РП на изменение схождения и поворот управляемого колеса. Поэтому, на основании анализа физической сущности процесса формирования смещений в РП и результатов экспериментальных исследований достаточно представительной выборки (105 автомобилей) путём совместного моделирования процесса изменения схождения и его влияние на изменение эксплуатационных свойств автомобилей было подобрано аппроксимированное выражение зависимости изменения схождения, т.е. смещений в РП от перечисленных факторов с допустимой погрешностью.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск