Механизация перегрузочных работ на контейнерных пунктах
Таким образом, при анализе вариантов механизации должны рассматриваться схемы работ с использованием консольных, бесконсольных козловых перегрузочных, железнодорожных, мостовых кранов в комплекте (или отдельно) с погрузчиками.
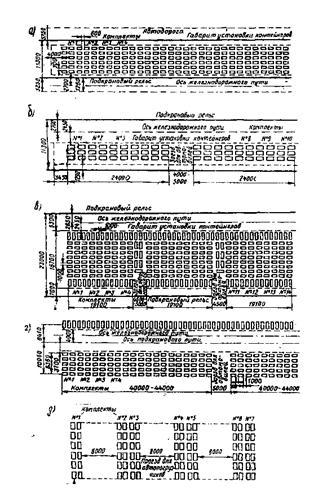
Рисунок 4. Варианты перегрузок контейнеров: а – с козловыми кранами; б – м
остовыми; в, г – стреловыми кранами; д – автопогрузчиками.
3. Анализ вариантов механизации перегрузочных работ на контейнерных пунктах
На пунктах переработки контейнеров применяются, в основном, козловые краны. Работу ППК организуют на основе типового технологического процесса работы порта, грузового района или грузовой станции.
При сравнении вариантов механизации перегрузки универсальных контейнеров типа УУК из вагонов и автопоездов, а также при их сортировке, принимается, что один кран, соответствующей грузоподъемности обрабатывает в сутки 10 полувагонов. С учетом совмещения операций рабочего цикла и сдвоенных операций (чередование выгрузки из полувагонов и автопоездов с погрузкой), целесообразно также обрабатывать полувагоны (платформы) и автомобили параллельно. При этом также уменьшается холостой пробег кранов и повышается производительность прямой перегрузки.
Работу контейнерных пунктов организуют следующим образом. Контейнеры сортируют без промежуточного хранения на площадке (так называемая сортировка без остатка), с промежуточным небольшой части транзитных контейнеров.
После перестановки перегружаемые контейнеры отправляют на прямых или частично сборных платформах. Контейнеры под накопление по назначениям плана формирования не выгружают. Необходимости в контейнерной площадке при этом способе сортировке нет. Небольшая площадь требуется только для ремонта неисправных или контейнеров кратковременного хранения, снимаемых с неисправных платформ.
На контейнерных пунктах, сортирующих контейнеры без остатка должны быть только перегрузочные пути и грузоподъемные машины. На контейнерных пунктах, сортирующих контейнеры с остатком, все транзитные контейнеры подразделяют на "ядро"; (перегружаемые и выгружаемые). "Ядро" остается на тех же платформах, которые прибыли; выгружаемые снимают и устанавливают на площадке, а перегружаемые переставляют с одних платформ на другие. Из "ядра" контейнеров местной погрузки формируют прямые, а когда это невозможно, сборные платформы. Поданные под сортировку платформы делят на две группы: местные — назначением на грузовые станции узла и транзитные - назначением на другие станции. На платформы первой группы устанавливают контейнеры, прибывшие в узел под выгрузку, а на платформы второй группы — отправляемые на станции расположенные за пределами узла.
Типовой технологический процесс, рекомендует использовать для перегрузки среднетоннажных контейнеров козловые краны КК-5, КК-6, оборудованные автостропами, которые позволяют осуществлять автоматическую строповку и расстроповку контейнеров. Автостроп, рис. 5 состоит из рамы, двух кареток 2 и 3, механизмов, захват 1, привода 5, ходового винта 6 и фиксирующих, козырьков 7.
 |
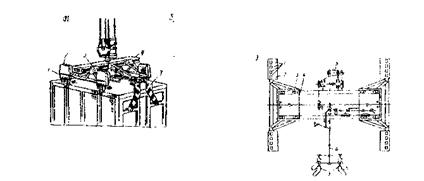
Рисунок 5. Автостроп для перегрузки среднетоннажных контейнеров а – общий вид, б – кинематическая схема; в – схема грузозахватного устройства.
Рама сварная из двух балок, по которой перемещается каретка. Ходовой винт, получая вращения через цепные передачи 8, разделенные муфтой предельного момента 9, сдвигает и раздвигает каретки 2 и 3. Механизмы захвата выполнены в виде гребенок, оборудованных четырьмя подпружиненными крюками 1 предназначенными для захвата рымных болтов контейнеров. Козырьки, ориентирующие автостроп относительно контейнера, связаны с выдвижной штангой и фиксируются двумя храповыми замками.
Перед установкой автостропа, каретки сдвигают до момента срабатывания муфты предельного момента. Автостроп опускается, козырьки, прижимаясь к боковым стенкам контейнера, ориентируют строи. Затем включается привод, раздвигает каретки, крюки скользят по крыше контейнера и, опускаясь под действием пружин в рымные ниши, захватываю болты. Для освобождения контейнера, каретки сдвигают, а крюки, освобождая рымные болты, выходят из ниш.
При поступлении на ПИК груженых вагонов вначале выгружают часть местных или некомплектующихся транзитных контейнеров данной подачи. Затем переставляют транзитные контейнеры из вагона в вагон. Затем выгружают оставшиеся местные и транзитные контейнеры, а загруженные до полных комплектов вагоны отправляют по назначению.
На специализированных ППК со среднесуточной погрузкой от 20 платформ и более рекомендуется использовать козловые краны КК 24/30.5 и КК-32, от 10 до 20 – краны КК-20, КК-32.
В соответствии с международным стандартом ISO контейнеры серии 1С изготавливают массой 20,0 т , т.е. их могут перегружать краны КК-24 или модернизированные КК-20 (с грузоподъёмностью на захвате 24т).
Перегрузка контейнеров серии 1А производится только в пределах пролета крана КК 25/30,5, А контейнеров серии 1В, 1С, 1Д и с выносом на консоли. Для этого один железнодорожный путь размещается под одной из консолей.
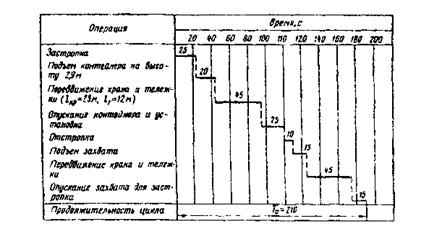
Типовой цикл работы крана КК-20, рис. 6 предусматривает как прямую перегрузку крупнотоннажных контейнеров, так и с установкой их на площадку. В соответствии с перегрузочным циклом, сменная производительность крана КК-20 при 8-часовом рабочем дне составляет 100 контейнероопераций, а при использовании автоматического захвата - 130 контейнере операций.
Предусмотрено использование козловых кранов КК-20 или КК-32 с пролетом 25м. Краны оборудуются автоматическими спредерами.
Технология переработки крупнотоннажных и среднетоннажных контейнеров аналогичны. Особенности заключаются в следующем. Выгрузка, погрузка и складская переработка крупнотоннажных контейнеров при отсутствии автоматических захватов (автостропов, спредеров) выполняются бригадой, включающей машиниста крана и одного или двух рабочих комплексной бригады.
Рабочие подготавливают места для установки контейнеров, убирают случайные предметы, снимают дополнительные крепления при выгрузке контейнеров из железнодорожных платформ.
При использовании спредера машинист крана после точной наводки на фитинги опускает его до плотной посадки и включает механизм поворота цапф с кулачками на 90, осуществляя захват контейнера. Получив сигнал о правильном выполнении операции захвата, машинист крана поднимает контейнер и переносит его к заданному месту установки, поднимая его на высоту не менее 0,5м выше встречающихся на пути предметов. Перед установкой контейнера на место машинист опускает его на расстояние 0,2 .0,3 м от покрытия площадки или крыши контейнера, затем поворачивает его в нужное положение и опускает, Контейнер должен быть установлен так, чтобы он опирался на все угловые фитинги.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск