Теоретическое исследование влияния характеристик и состояния рулевого привода на эксплуатационные свойства автомобилей
![]() . (36)
. (36)
Оптимальное значение показателя поворачиваемости находится в пределах 2-30 при действии на автомобиль поперечной силы, равной 0,3-0,4 силы его тяжести.
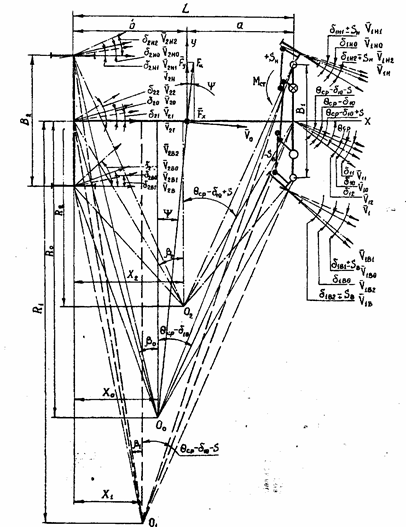
Для анализа связей между углами поворота управляемых колёс, углами увода осей и колёс и смещениями в кинематической цепи рулевого привода воспользуемся схемой (рис.
10). Из схемы поворота автомобиля следует, что при равномерном криволинейном движении автомобиля, часть рулевого привода, принадлежащая наружному управляемому колесу, во время поворота сжимается, вызывая уменьшение схождения управляемых колёс. Часть же рулевого привода, принадлежащая внутреннему управляемому колесу, растягивается, а колесо стремится повернуть в сторону увеличения схождения УК.
В момент силового замыкания в кинематической цепи РП, когда на автомобиль не действуют переменные возмущающие силы, влияние смещений в РП на параметры поворота незначимо. В случае же нарушения силового замыкания, вызванного действием переменных по модулю и направлению сил и моментов, смещения в кинематической цепи, значит и критерий качества РП, оказывают значимое влияние на параметры поворота: мгновенный радиус и смещение полюса поворота, а также на скорость изменения углов увода управляемых колёс.
0 – с нейтральной поворачиваемостью, 1 - с недостаточной поворачиваемостью, 2 – с избыточной поворачиваемостью.
Рис. 10. Схема для определения зависимостей между углами поворота передних колёс, углам увода осей и колёс и смещениями в кинематической цепи рулевого привороте при повороте автомобиля
Экспериментальные исследования стабилизирующих моментов на управляемых колёсах в дорожных испытаниях и упругости рулевого привода в лабораторных исследованиях показали, что смещения в кинематической цепи правой и левой (по ходу движения), а также внутренней и наружной (по отношению к центру поворота) половин рулевого привода не равны между собой, но связаны соотношениями:
![]() , (37)
, (37)
![]() . (38)
. (38)
Смещения в кинематической цепи каждой половины рулевого привода оказывают различное влияние на изменение углов увода соответствующих колёс передней оси. Причём, при изменении угла увода передней оси угол увода задней оси такие, не остаётся постоянным, что влияет на их разность, т.е. на поворачиваемость. Смещения в кинематической цепи, кроме того, непосредственно влияют на угол поворота управляемых колёс, вызывая их самоповорот.
В каждое мгновение угол поворота управляемого колеса, заданный рулевым механизмом, изменяется в общем виде:
![]() , (39)
, (39)
![]() . (40)
. (40)
Таким образом, поворачиваемость связана со смещениями в РП посредством угла увода передней оси и коэффициента сопротивления шин боковому уводу. Рассмотрев зависимость изменения мгновенного радиуса поворота с учётом величин моментов на управляемых колёсах можно оценить степень влияния смещений в РП на поворачиваемость.
Радиус поворота в рассматриваемых условиях движения можно определить по рекомендациям Фаробина Я.Е. Литвинова А.С. [64]:
 (41)
(41)
поворота управляемых колёс происходит только за счёт изменения углов увода, вызванных наличием смещений в рулевом приводе.
В случае движения автомобиля с «фиксированным рулевым колесом» при входе в поворот углы поворота управляемых колёс изменяются, кроме того, ещё и непосредственно на величину смещений, тогда [49] будет
 . (42)
. (42)
В случае движения автомобиля по траектории, близкой к прямолинейной, влияние изменения углов увода незначимо ввиду их малых величин. Смещения в РП оказывают прямое влияние на угол поворота УК:
 . (43)
. (43)
Окончательно текущее значение угла увода передней оси:
![]() . (44)
. (44)
Причём выражение (41) определяет не только величину, но и знак второго слагаемого формулы (43),т.к. включает величины коэффициентов сопротивления уводу каждого колеса оси и коэффициент связи между смещениями частей РП, принадлежащих наружному и внутреннему колесу.
Таким образом, показатель степени поворачиваемости автомобиля (36) с учётом смещений в кинематической цепи РП принимает вид:
![]() . (45)
. (45)
Результаты теоретических и экспериментальных исследований, выполненных Немцовым Ю.М. показали, что зависимости изменения разности углов увода осей от угла поворота УК носят линейный характер. Это подтверждает целесообразность использования линейного характера поворачиваемости от смещений в РП для углов увода до 8-10°.
С помощью полученных выражений для мгновенного радиуса поворота и поворачиваемости можно получить ряд характеристик управляемости и устойчивости, что может быть использовано при моделировании основных режимов движения автомобиля.
3.10 Курсовая устойчивость - g
Многими авторами отмечено, что для аналитического определения параметров устойчивости и управляемости отсутствуют общепризнанные методики расчёта, в тоже время их зависимость от критерия качества РП очевидна, [64 и др.]. Наиболее полным аналитическим исследованием курсовой устойчивости следует считать выполненное Литвиновым А.С.[64], рассмотревшим линейные и нелинейные, одно и двух массовые математические модели автомобилей.
Для решения задач, поставленных в работе, исследование влияния критерия качества РП выполним при допущении постоянства всех факторов, определяющих изменение углов увода, кроме момента на колесе и его дополнительного поворота на величину смещений в РП
Используем оценочные параметры и методику их определения, рекомендованные Фаробиным Я.Е. :
а) статическая курсовая устойчивость - оценочный параметр угол дрейфа, под которым понимается угол между вектором скорости точки проекции кинематического центра на продольную ось и продольной осью, т.е. для двухосного автомобиля это угол увода середины задней оси. Исходя из возможности ликвидации дрейфа углом поворота рулевого колеса не большим 120° при передаточном отношении РМ около 15:
![]() .
.
при боковом ускорении 4 м/с и скорости движения от 40 до 100 км/ч. Эта характеристика оценивает склонность автомобиля к заносу;
б) курсовая устойчивость при резком повороте руля («рывок руля») - оценочный параметр - отклонение мгновенного значения реакции от её установившегося значения в %, при боковом ускорении 4 м/с, повороте руля от 0,5 до 5,5 рад и скорости его поворота не менее 8,5 рад/с. Нормируется зависимость оценочного параметра от времени, которая характеризует процесс входа в поворот при различных углах поворота РК и скорости движения при конечном боковом ускорении 4 м/с. Область её допустимых значений приведена [1];
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск