Виды гидроусилителей
1 - шарнир; 2 - тяга; 3 - золотник распределителя; 4 - поршень;
5 - корпус силового цилиндра; 6 - шарнир; 7 - дифференциальный рычаг
Этот гидроусилитель состоит в основном из тех же элементов что и рассмотренный выше усилитель рулевого привода автомобиля. При перемещении тяги 2, связанной с ручкой управления, перемещается шарнир 1 дифференциального рычага 7 обратной связи, с которым вяз
аны штоки силового цилиндра 5 и золотника распределителя 3. Так как силы, противодействующие смещению золотника распределителя, значительно меньше соответствующих сил, действующих в системе силового поршня 4, то шарнир 6 может рассматриваться в начале движения тяги 2 как неподвижный, ввиду чего движение его вызовет через рычаг 7 смещение плунжера золотника распределителя 3. В результате при смещении золотника из нейтрального положения, жидкость поступит в соответствующую полость цилиндра 5, что вызовет перемещение поршня 4, а следовательно, и шарнира 6, связанного с "выходом". При этом выходное звено сместится пропорционально перемещению тяги 2.
После того как движение тяги 2 будет прекращено, продолжающийся выдвигаться поршень 4 сообщит через рычаг 7 обратной связи плунжеру золотника распределителя 3 перемещение, противоположное тому, которое он получал до этого при смещении тяги 2 управления. Так как при этом расходные окна золотника будут в результате обратного движения плунжера постепенно прикрываться, количество жидкости, поступающей в цилиндр 5, уменьшится, вследствие чего скорость его поршня будет уменьшаться до тех пор, пока плунжер золотника не придет в положение, в котором окна полностью перекроются, при этом скорость станет равной нулю.
При перемещении плунжера золотника в противоположную строну движение всех элементов регулирующего устройства будет происходить в обратном направлении.
В действительности отдельных этапов движения "входа" и "выхода" рассматриваемого следящего привода с жесткой обратной связью не существует, и оба движения протекают практически одновременно, т.е. имеет место не ступенчатое, а непрерывное "слежение" исполнительным механизмом за перемещением "входа".
3.2 Гидроусилитель с соплом и заслонкой
. 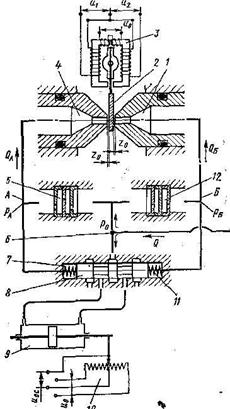
Рис.5. Схема гидроусилителя типа сопло-заслонка
Гидроусилитель типа сопло-заслонка показан схематически на рис. 5. состоит из сопел 1 и 4, которые вместе с подвижной заслонкой 2 образуют два регулируемых щелевых дросселя, и нерегулируемых дросселей 5 и 12, установленных на пути подвода жидкости из точки 6, куда она подается от насоса. Работа такой дроссельной системы, являющейся первым каскадом гидроусилителя. Исполнительным механизмом гидроусилителя служит гидроцилиндр 9.
Первый каскад управляет смещением золотника 8, который является вторым каскадом гидроусилителя и непосредственно управляет гидроцилиндром.
Вся система нужна для того, чтобы на входе мог быть использован маломощный электрический командный сигнал от задающей электронной аппаратуры. Этот сигнал подается на подается обмотки миниатюрного электромеханического преобразователя 3 (поворотного электродвигателя) в виде разности напряжений ![]() и
и ![]() в результате чего происходит отклонение заслонки 2, до ее отклонения обе дросселирующие ветви А и Б имели одинаковые сопротивления и пропускали одинаковые расходы
в результате чего происходит отклонение заслонки 2, до ее отклонения обе дросселирующие ветви А и Б имели одинаковые сопротивления и пропускали одинаковые расходы ![]() и
и ![]() . После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений
. После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений ![]() и
и ![]() в узловых точках ветвей. Эта разница давлений вызывает смещение золотника 8 центрируемого пружинами 7 в 11, что в конечном итоге приводит в действие гидроцилиндр.
в узловых точках ветвей. Эта разница давлений вызывает смещение золотника 8 центрируемого пружинами 7 в 11, что в конечном итоге приводит в действие гидроцилиндр.
Если в такой системе па выходе исполнительного механизма, предусмотрен датчик обратной связи 10, сигнализирующий об исполнении подавной команды напряжением, ослабляющим сигнал на входе, то она будет представлять электрогидравлическую следящую систему.
Главным преимуществом такого гидроусилителя является применение простейших квадратичных дросселей, но чувствительных к засорениям и к изменению вязкости жидкости. Такие дроссели, имея нелинейные характеристики, позволяют при взаимодействии получить характеристики со взаимосвязью входных и выходных параметров близкой к линейной. В рассматриваемой системе, входной параметр — отклонение заслонки 3 ,а выходной — различие давлений ![]() и
и ![]() , смещающее золотник 8. Линейность таких взаимосвязей всегда желательна, так как упрощает применение гидроусилителя в качестве составной части сложных автоматических систем.
, смещающее золотник 8. Линейность таких взаимосвязей всегда желательна, так как упрощает применение гидроусилителя в качестве составной части сложных автоматических систем.
Уравнения пропускной способности ветвей А и В гидроусилителя, в которых нерегулируемый дроссель и регулируемое сопло пропускают одинаковый расход, имеют вид


где ![]() коэффициент расхода дросселя;
коэффициент расхода дросселя; ![]() — коэффициент расхода сопла.
— коэффициент расхода сопла.
Значения коэффициентов ![]() и
и ![]() для этих элементов в ветвях А и Б, вообще говоря, могут быть различны из-за различия расходов
для этих элементов в ветвях А и Б, вообще говоря, могут быть различны из-за различия расходов ![]() исмещений
исмещений ![]() , ведущего к различию в
, ведущего к различию в ![]() .
.
Смещения ![]() заслонки по отношению к двум соплам взаимосвязаны:
заслонки по отношению к двум соплам взаимосвязаны:
![]()
![]()
![]()
Максимальное смещение ![]() не может превышать для упрощении
не может превышать для упрощении ![]() . Для упрощения записи введем понятия
. Для упрощения записи введем понятия ![]() проводимости элементов: для нерегулируемых дросселей
проводимости элементов: для нерегулируемых дросселей  - близкая к постоянной величина, изменяющаяся только с изменением
- близкая к постоянной величина, изменяющаяся только с изменением ![]() ; для регулируемых дросселей сопел -
; для регулируемых дросселей сопел -  -переменная величина из-за переменности
-переменная величина из-за переменности ![]() и
и![]() .
.
Другие рефераты на тему «Транспорт»:
Поиск рефератов
Последние рефераты раздела
- Проект пассажирского вагонного депо с разработкой контрольного пункта автосцепки
- Проектирование автомобильных дорог
- Проектирование автотранспортного предприятия МАЗ
- Производственно-техническая база предприятий автомобильного транспорта
- Расчет подъемного механизма самосвала
- Системы автоблокировки
- Совершенствование организации движения и снижение аварийности общественного транспорта в городе Витебск