Разработка канала для комплексной скважинной аппаратуры
Микропроцессор МП2 осуществляет управление информационной шиной, включая получение цифровых данных от всех датчиков базового и дополнительных модулей и передачу команд соответствующим узлам прибора. Цифровые данные, полученные в цикле опроса всех измерительных каналов, поступают из микропроцессора МП2 в микроконвертор МК6, в котором производятся вычисления значений измеряемых величин в соответс
твии с используемыми математическими моделями измерительных каналов и хранящимися в памяти МК6 индивидуальными значениями параметров этих моделей, а также в соответствии с используемыми алгоритмами автокоррекции погрешностей. Кроме того, в МК6 производится преобразование в цифровой код напряжения, пропорционального току стабилизатора напряжения блока питания БП.
При передаче измерительной информации по геофизическому кабелю используется двоичный код небольшой разрядности (15 информационных разрядов). В связи с этим для обеспечения максимальной эффективности использования этого кода в МК6 производится преобразование вычисленного значения каждой измеряемой величины в двоичный код, передаваемый по кабелю. Код, поступает в микропроцессор МП3, который преобразует его в код фазоразностной модуляции, управляющий работой устройства передачи данных УПД.
Блок питания БП преобразует ток питания, подаваемый по кабелю от геофизического регистратора, в стабилизированное напряжение +5 В на шине питания, а также формирует команду на включение СТИ при увеличении тока в кабеле , примерно, на 120 мА [7].
2.2 Структурная схема каналов измерения температуры и влажности
Здесь можно выделить два канала: канал измерения влажности и канал измерения температуры.
Первичным преобразователем влажности ППВ является емкостной параметрический датчик. Емкость удобнее всего преобразовывать в период или частоту. Значит, необходим измерительный преобразователь ИП, который бы осуществлял это преобразование. Частоту или период целесообразно преобразовать в цифровой код, для удобства передачи информации. Для этих целей используется АЦП1.
Аналогичную структуру имеет канал измерения температуры. Первичным преобразователем ППТ здесь является термистор. Для его питания необходим источник тока ИТ. При подаче тока на первичный преобразователь ППТ температура преобразуется в напряжение. В свою очередь, напряжение также целесообразно преобразовать в цифровой код. Поэтому необходим второй АЦП.
Для удобства дальнейшей передачи данных, а также для управления АЦП1 и АЦП2 необходим микроконтроллер КНТ, в состав которого входят следующие компоненты:
- микропроцессор МП;
- оперативно запоминающее устройство ОЗУ;
- память программ;
- интерфейс.
Управляющие воздействия от КНТ подаются на АЦП1 и АЦП2. Для передачи данных к каротажной станции используется цифровая магистраль.
Также в состав структуры должен входить блок питания, от которого питались бы все компоненты схемы. Сам блок питается от каротажной станции посредством магистрали питания.
Структурная схема приведена на рис. 2.2.
Структурная схема каналов измерения температуры и влажности
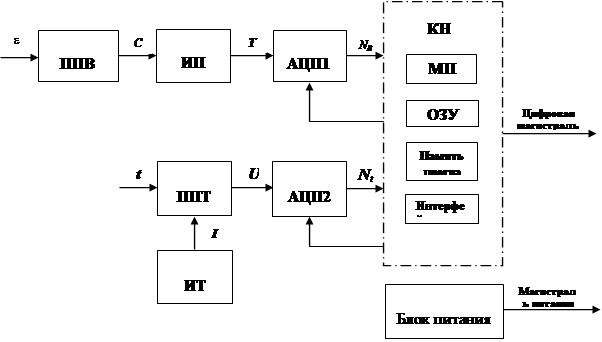
Рис. 2.2
2.3 Выбор основных узлов
Как уже отмечалось выше, датчик влажности представляет собой емкостной датчик диэлькометрического типа, электрическая емкость которого изменяется при изменении диэлектрической проницаемости исследуемой жидкости.
Измерительный преобразователь емкости в период повторения импульсов представляет собой схему мультивибратора на операционном усилителе с большим коэффициентом усиления.
В качестве АЦП1 для преобразования периода в цифровой код используется таймер-счетчик.
В датчике температуры (ДТ) в качестве первичного преобразователя используется миниатюрный термистор, обладающий высокой чувствительностью и долговременной стабильностью характеристик. Для обеспечения высокой точности измерений применена нелинейная математическая модель функции преобразования термистора, которая используется для вычисления значения измеряемой температуры непосредственно в базовом модуле.
Большой ТКС термисторов определяет большое изменение сопротивления датчика в рабочем диапазоне температур. В связи с этим применение мостовой схемы включения датчика не имеет смысла. Поэтому в цифровых термоизмерительных приборах и системах целесообразно использовать Сигма-Дельта АЦП и ratio-метрическую схему подключения к нему термисторного датчика.
Необходимо отметить, что большое сопротивление термисторов и их большой ТКС практически снимают проблему влияния сопротивлений подключающих датчик проводов. Если термистор имеет сопротивление 2 кОм, то изменение сопротивления проводов на 0,1 Ом приведет к погрешности по температуре порядка 0,002 ºС. В связи с этим нет необходимости использовать какие-либо сложные схемы подключения датчика (3х-4х-проводные).
Анализ структурной схемы показал, что для данной схемы целесообразно использовать микроконвертор, типа АDuC834 фирмы Analog Devices.
Микроконвертор ADuC834 является функционально законченным контроллером интеллектуального датчика, включающим в себя: два аппаратных модуля сигма-дельта АЦП высокого разрешения (24-разрядное и 16-разрядное), 8-разрядное микропроцессорное устройство управления и встроенную Flash-память программ и данных. Это малопотребляющее устройство принимает сигналы низкого уровня непосредственно с первичного преобразователя.
Кроме двух независимых модулей АЦП (основного и дополнительного) в составе устройства имеется датчик температуры и прецизионный программируемый усилитель, что позволяет выполнять прямые измерения малых уровней напряжения. АЦП с встроенным цифровым фильтром предназначены для измерения низкочастотных сигналов в широком динамическом диапазоне, таких, как сигналы с устройств взвешивания, тензометров или сигналы с температурных датчиков. Частота выдачи результатов измерений с выходов АЦП программируется.
Микроконвертор спроектирован для работы с внешним кварцевым резонатором на частоту 32 768 Гц, из которой встроенная система ФАПЧ вырабатывает внутреннюю рабочую частоту 12,58 МГц. Эта частота поступает на программируемый делитель, с выхода которого снимается рабочая тактовая частота вычислительного ядра микропроцессорного устройства. Такая схема организации тактирования позволяет ослабить вредное влияние паразитных высокочастотных токов, протекающих по общей шине и шине питания устройства, на точность аналого-цифровых преобразований. Процессорное ядро представляет собой микроконтроллер с системой команд, совместимой с набором инструкций семейства 8051. Машинный цикл ядра состоит из двенадцати циклов выбранной рабочей тактовой частоты. Микроконвертор имеет 8 кбайт Flash-памяти программ, 640 байт Flash-памяти данных и 256 байт оперативной памяти данных с произвольным доступом.
В состав ADuC834 включены также 12-разрядный ЦАП с выходом напряжения, два источника тока, монитор источника питания. Встроенная цифровая периферия микроконвертора включает в себя сторожевой таймер, счетчик временных интервалов (реального времени), три таймера-счетчика и модули последовательных портов UART и I2C/SPI.
Другие рефераты на тему «Геология, гидрология и геодезия»:
- Постановка поисково-оценочного бурения на Иньвинской площади
- Оценка теплого периода для определения оптимальных условий ведения сельского хозяйства на территории юга Западной Сибири
- Основы разработки месторождений полезных ископаемых
- Разработка технологии получения электронных крупномасштабных планов
- Межевание земельного участка Гатчинского района
Поиск рефератов
Последние рефераты раздела
- Анализ условий формирования и расчет основных статистических характеристик стока реки Кегеты
- Геодезический чертеж. Теодолит
- Геодезические методы анализа высотных и плановых деформаций инженерных сооружений
- Асбест
- Балтийско-Польский артезианский бассейн
- Безамбарное бурение
- Бурение нефтяных и газовых скважин