Использование потенциометрического эффекта для измерения физических величин
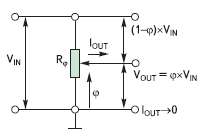
Рисунок 2.1 - Физическая модель потенциометрического датчика: j - измеряемый угол поворота; Rj - переменное сопротивление датчика; Vin, Vout - напряжение питания и выходное напряжение, соответственно; Iout - выходной ток
Если подвижный контакт связать с детектируемым объектом и подать напряжение питания на край
ние терминалы, потенциометр может быть использован, во-первых, как датчик линейных или угловых перемещений j, а во-вторых, как датчик абсолютного положения - то есть любых механических параметров движения, определяемых по изменению или абсолютному значению разности потенциалов.
Существует очень много физических конструкций, помимо показанных на рисунках 2.2, 2.3, 2.4, 2.6, которые позволяют изменять сопротивление потенциометра: проволочные нити, ремни и шкивы, зубчатые стойки и шестерни, проводящая резьба, кабельные барабаны, кулачки, конические или наклонные зубчатые колеса, обычные или червячные зубчатые передачи и т.д. Но во всех общим является то, что сенсорный контактный резистивный элемент представляет собой потенциометр либо реохорд.
Поскольку фиксированный элемент датчика - резистивного типа, и изменение разности потенциалов достигается за счет изменения его сопротивления, потенциометры относятся к резистивным датчикам. (Магниторезистивные и индуктивные датчики переменного импеданса, к примеру, - это также варианты резистивных датчиков, но бесконтактного типа, активируемые переменным магнитным полем).
Среди промышленно выпускаемых устройств выделяются три основные технологии контактных резистивных датчиков:
проволочные резистивные устройства, обычно представляющие собой проволочный реохорд или, например, в спиралевидной конфигурации, допускающие измерение углов даже более 360° или линейные измерения (рисунок 2.2);
потенциометры с толстопленочными резистивными дорожками, выполненными способом нанесения на поверхность печатной платы резистивной пасты (графитовой или углеродно-волоконной, сажи) - по радиусу или вдоль длины токопроводящего сектора, контакт с которым осуществляется посредством контактных щеток (рисунки 2.3, 2.4);
гибридные потенциометры, в которых проводящая резистивная паста наносится поверх проволочного спирального потенциометра (рисунок 2.7).

Рисунок 2.2 - Многооборотный проволочный потенциометр: вращающийся вал - цель; 2 - контактный элемент движка; 3 - многооборотная спиральная катушка сопротивления; 4 - движок; 5 - крепление движка к валу 1; 6 - стационарная втулка-основание; 7 - резьбовой наконечник вала для осевого перемещения вала в резьбовом отверстии втулки 6; 8 - 10 - терминалы устройства; j - измеряемый угол поворота; l - линейный осевой ход вала
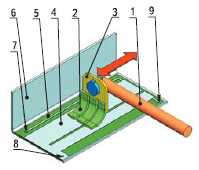
Рисунок 2.3 - Конструкция линейного датчика: 1 - вращающийся вал - цель; 2 - контактная щетка; 3 - элемент механического крепления щеток; 4 - резистивный слой; 5 - печатная плата; 6 - корпус устройства; 7 - 9 - терминалы устройства
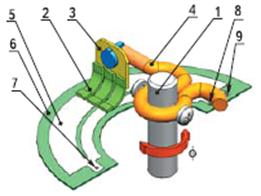
Рисунок 2.4 - Конструкция углового датчика (в диапазоне 180°): 1 - вращающийся вал - цель; 2 - контактная щетка; 3, 4 - элементы механического крепления щеток; 5 - резистивный слой; 6 - печатная плата; 7 - 9 - терминалы устройства
Проволочные потенциометры могут быть разнообразны по форме, которая зависит от количества витков, способны, как явствует из рисунка 2.2, детектировать и линейные, и нелинейные перемещения, но для многообразных угловых (или, в модели реохорда, линейных) измерений предполагают высокий профиль и значительные габаритные размеры.
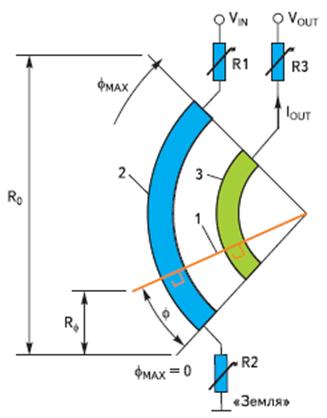
Рисунок 2.5 - Схемотехника (принцип действия) углового толстопленочного потенциометрического датчика (в диапазоне до 360°): 1 - скользящий контакт (движок или контактная щетка); 2 - резистивная дорожка; 3 - контактная дорожка; j - измеряемый угол поворота; R0 - максимальное сопротивление датчика; R1, R2 - трассировочные резисторы; R3 - нагрузочный резистор; Vin, Vout - напряжение питания и выходное напряжение, соответственно; Iout - выходной ток
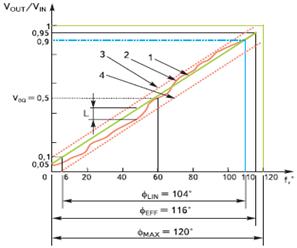
Рисунок 2.6 - Нормализованная выходная передаточная характеристика аналогового углового потенциометрического датчика положения дроссельной заслонки: j - механический угол поворота; Vout - выходное напряжение; V0Q - среднеквадратическое напряжение; jmax - максимальный механический диапазон угла вращения; jeff - эффективный электрический угол (полный диапазон); jlin - линейный участок кривой (рабочая зона); 1 - идеальная выходная характеристика; 2 - неидеальная выходная характеристика; 3, 4 - границы допусков линейности
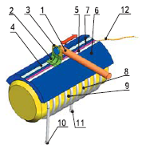
Рисунок 2.7 - Конструкция гибридного потенциометра: 1 - вращающийся вал - цель; 2 - контактная щетка; 3 - элемент механического крепления щеток; 4 - резистивный слой, контактирующий с проводящей резиной 6 и спиральной проволочной катушкой сопротивления 8; 5 - измерительная дорожка, отделяемая от проводящей резины слоем изоляционного материала 7; 9 - оправка катушки; 10 - 12 - терминалы устройства
Прежде чем детально анализировать особенности, достоинства и недостатки технологии толстопленочных потенциометров (рисунки 2.3, 2.4, 2.5, 2.6), которые сегодня чрезвычайно широко распространены в автоэлектронике, необходимо отметить, что возможно и объединение обеих технологий с так называемыми hybrid coil - гибридными резисторными катушками-спиралями, допускающими многооборотные изменения. Гибридный резистивный элемент представляет собой резистор wirewound, поверх которого нанесена проводящая пластмассовая или резиновая паста, что делается для достижения бесконечного (в теории) разрешения (рисунок 2.7) и максимальной функциональной точности. Хотя концептуальный эскиз автора на рисунке 2.2 также иллюстрирует возможность получения бесконечного разрешения с резистором wirewound-типа, на практике большинство конструкций wirewound-резисторов позволяют получить только скачкообразное дискретное разрешение, если датчик линейных перемещений используется как реостат в схеме делителя напряжения. На рисунке 2.7 показано, как скачкообразность разрешения устраняется в гибридной катушке сопротивления. Линейные перемещения могут быть эквивалентны многооборотному угловому движению, как показано на рисунке 2.2, для которого линейное перемещение движка выполняется в осевом направлении. Кроме того, гибридные катушки позволяют повысить срок службы потенциометров, который для резисторов wirewound-типа сейчас достигает 2 млн циклов, и занять промежуточное положение по этому параметру между wirewound-резисторами и толстопленочными потенциометрами (для которых срок службы может быть свыше 8 млн циклов). Потребляемая мощность - порядка нескольких Вт, сравнимая с wirewound-резисторами, температурная стабильность - также превосходная, как у wirewound-потенциометров.
Другие рефераты на тему «Физика и энергетика»:
Поиск рефератов
Последние рефераты раздела
- Автоматизированные поверочные установки для расходомеров и счетчиков жидкостей
- Энергосберегающая технология применения уранина в котельных
- Проливная установка заводской метрологической лаборатории
- Источники радиации
- Исследование особенностей граничного трения ротационным вискозиметром
- Исследование вольт-фарадных характеристик многослойных структур на кремниевой подложке
- Емкость резкого p-n перехода