Замкнутые системы управления
Тогда
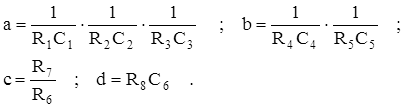
 - апериодическое звено;
- апериодическое звено;
То=СосRoc;
или
 .
.![]()
Реализация сложных регуляторов по их передаточным функциям.
Сложный регулятор - регулятор, который не может быть реализован на од
ном ОУ.
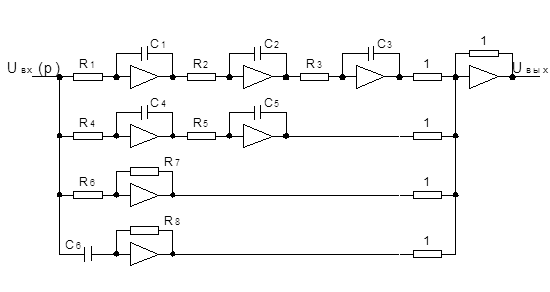
Рис. 25
Регулятор скорости с отрицательной обратной связью по скорости
Рассмотрим статические и динамические характеристики регуляторов скорости с различными видами обратных связей. При этом понимаем, что все элементы , образующие систему , являются линейными стационарными .
Структурная схема системы регулирования скорости с обратной связью по скорости представлена на рис.10-3
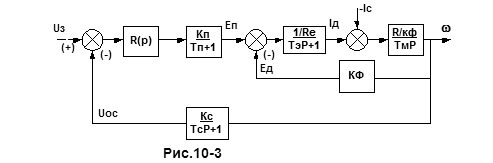
На структурной схеме (Рис.10-3.) приняты следующие обозначения:
R(Р)- передаточная функция регулятора;
![]() - датчик скорости;
- датчик скорости;
Тс - постоянная времени фильтра;
Kc- коэффициент передачи обратной связи по скорости;
Kп, Тп- коэффициент усиления и постоянная времени тиристорного преобразователя;
Тэ, Тм - электромагнитная и электромеханическая постоянная времени двигателя;
![]() ;
;
Rэ и Lэ- эквивалентные сопротивления и индуктивность якорной цепи;
1/Кд=C- внутренняя отрицательная обратная связь по ЭДС двигателя,
C- постоянная двигателя при Ф=const. C=кф;
Тэ=Lэ/Rэ;
J-момент инерции двигателя с рабочей машиной.
Статический регулятор скорости
Регулятор пропорционального типа с коэффициентом передачи Кр.
Определение статических характеристик:
w=f(U3); w=f(Icт), т.е. зависимости скорости от задающего и возмущающего воздействия.
Преобразуем структурную схему: вынесем возмущение Iст из замкнутого контура, затем преобразуем замкнутый контур двигателя в динамическое звено без обратной связи (Рис. 10-4.).
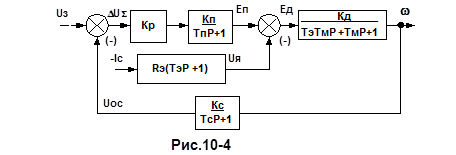
Положив в полученной схеме р=0,что соответствует установившемуся режиму получим ![]() :
:

где К=Кр×Кп×Кс×Кд- коэффициент усиления разомкнутой системы;
В разомкнутой системе :
wор = Кр×Кп×Кд U3 -скорость идеального холостого хода;
Dwр = Кд×Rэ×Iс-падение скорости;
следовательно: w03 = wор/(1+К); Dw3с = Dwр/(1+К).
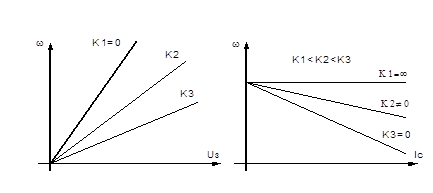
На рис. представлены статические характеристики
а) ![]() при IС=0;
при IС=0;
в) ![]() при
при![]() .
.
Т.к. в прямой цепи замкнутого контура системы нет идеального интегрирующего звена, рассматриваемая система является статической как по возмущающему (Iс), так и по управляющему (U3) воздействиям и имеет статические ошибки по этим воздействиям.
Определим статическую ошибку по возмущающему воздействию Iс. ![]() т.е. выражение для DwI совпадает с величиной падения скорости в замкнутой системе.
т.е. выражение для DwI совпадает с величиной падения скорости в замкнутой системе.
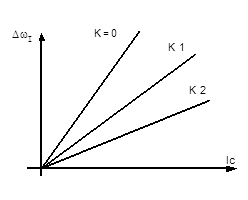
Рисунок 10-6- статическая характеристика DwI = f(Ic).
Характеристика построена для w03=const для различных коэффициентов усиления К2>К1>0.
Статическая ошибка по возмущающему воздействию прямо пропорциональна величине нагрузки, характеризуемой Iс, и обратно пропорциональна коэффициенту усиления К.
Статическая ошибка по управляющему воздействию U3

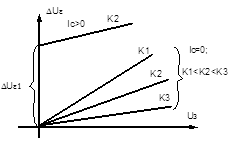
Ueо- статическая ошибка по управляющему воздействию замкнутой системы при Iс = 0,
DUeI- приращение статической ошибки, обусловленное Iс.
DUe увеличивается с возрастанием нагрузки Iс Рис. 10-7.
При К=¥ DUe=0.
Динамические характеристики:
для оценки влияния отрицательной обратной связи по скорости, типа и параметров регулятора на свойства регулятора скорости сравним передаточные функции (п.ф.) разомкнутых и замкнутых систем регулирования W.
Примем Тс и Тп равными 0 ввиду их малости по сравнению с Тэ и Тм. Передаточная функция системы по управляющему воздействию:
 .
.
Линейная стационарная система второго порядка всегда устойчива. Предельный коэффициент усиления Кпр = ¥. Качество переходного процесса полностью определяется относительным коэффициентом демпфирования x и собственной частотой колебания Wо (при x = 0).
Собственная частота Wо характеризует быстродействие системы; чем больше Wо, тем быстрее затухает переходной процесс.
Для разомкнутой системы :
![]()
![]()
При x<1- переходной процесс колебательный затухающий.
При x>1- переходной процесс апериодический.
При x=0- незатухающие гармонические колебания.
x-коэффициент демпфирования.
Передаточная функция замкнутой системы по управляющему воздействию

Для замкнутой системы:
![]()
![]()
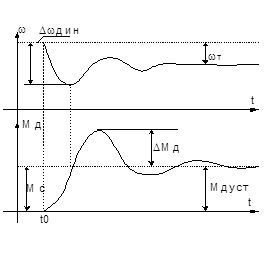
То есть, жесткая отрицательная обратная связь по скорости увеличивает Wо и уменьшает x3 в ![]() раз. Значит с ростом К возрастает скорость затухания и уменьшается колебательность (перерегулирование) переходного процесса. Жесткая отрицательная обратная связь по w улучшает устойчивость, т.к. уменьшается Тм и ТэТм в (1+К) раз. Аналогично исследуются переходные процессы, обусловленные действием нагрузки в виде ударного приложения Мс (или Iс = КдМс) к валу двигателя.
раз. Значит с ростом К возрастает скорость затухания и уменьшается колебательность (перерегулирование) переходного процесса. Жесткая отрицательная обратная связь по w улучшает устойчивость, т.к. уменьшается Тм и ТэТм в (1+К) раз. Аналогично исследуются переходные процессы, обусловленные действием нагрузки в виде ударного приложения Мс (или Iс = КдМс) к валу двигателя.
Переходная функция замкнутой системы по возмущающему воздействию:


где Iд, Mд- динамические ток и момент.
Если Р=0 (установившийся режим) Iд = Iс ;
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды