Исполнительные механизмы
- устанавливают движок реостатного датчика в среднее положение относительно верхнего и нижнего хомутиков датчика. Регулируя длину выключающей тяги, сочленяют её с рычагом и поводком сервомотора, затем к клеммам 1-2-3 блока подключают индикатор положения типа ИПУ и подают напряжение. Полностью вводят потенциометр чувствительности «Ч»
Корректором «К» ИПУ устанавливают стрелку на середину его
шкалы.
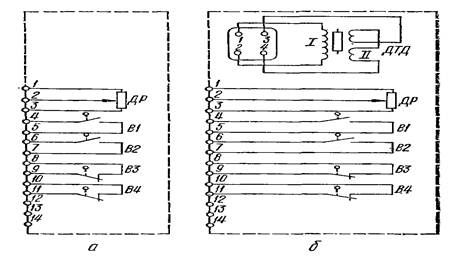
Рис. 1. Электрические схемы блоков сервомоторов типа БС:
а – БС-1; б – БС-2 и БС-3; ДТД дифференциально-транспортный датчик; ДП – датчик реостатный; В1 – В4 концевые и путевые выключатели.
Поворачивают выходной вал сервомотора при помощи штурвала ручного управления на 45о от среднего положения против часовой стрелки (смотреть со стороны выходного вала). При этом стрелка индикатора ИПУ должна переместиться в сторону «0» его шкалы. В противном случае необходимо поменять местами концы на клеммах 1-3 блока БС либо 6-7 ИПУ. С помощью потенциометра «Ч» ИПУ устанавливают стрелку на «0». При этом должен разомкнуться контакт выключателя. Размыкание выключателя регулируют регулировочным винтом; устанавливают вал ИМ и стрелку индикатора ИПУ в среднее положение.
Аналогичным образом регулируют положение потенциометра «Ч» при установке стрелки индикатора на 100 % и размыкание выключателя при повороте выходного вала на 45о против часовой стрелки.
Указанные операции повторяют до тех пор, пока при крайних положениях выходного вала МЭО стрелка ИПУ не будет устанавливаться точно на крайних делениях. Стрелка должна перемещаться плавно, без скачков. В противном случае зачищают обмотку реостат по линии касания движка.
После сочленения МЭО с регулирующим органом иногда проводят дополнительную регулировку. Уточняют действительный поворот выходного вала, обеспечивающий перемещение штока регулирующего органа из одного крайнего положения в другое, корректируют положение механических упоров. Конечные выключатели устанавливают так, чтобы они срабатывали при подходе кривошипа к упору на угол, равный 3о.
1.2 Пневматические исполнительные механизмы
В качестве исполнительных механизмов в пневматических системах применяются поршневые и мембранные пневмоприводы.
Поршневые отличаются от мембранных большей величиной перемещения рабочего органа и большим развиваемым усилием. Применяются они редко.
Мембранно-пружинные исполнительные механизмы (МИМ) в зависимости от направления движения выходного звена подразделяются на ИМ прямого (МИМ ППХ) и обратного (МИМ ОПХ) действия. Пневмоприводы могут быть с дополнительными блокам, которые обозначаются в шифре прибора: позиционер – 02; боковой ручной дублёр –01; верхний ручной дублёр – 01В; позиционер и боковой дублёр – 05; позиционер и верхний дублёр – 05В; Им – без дополнительных блоков – 10.
В обозначение МИМ входят: тип механизма, диаметр заделки мембраны, полный ход выходного звена, комплектация дополнительными блоками, группа механизма в зависимости от параметров окружающей среды, стандарт. Например, МИМ прямого действия с диаметром заделки мембраны 320 мм, полным ходом выходного звена 25 мм, позиционером для работы при температуре окружающей среды (-30) – (+50) оС обозначается МИМ ППХ – 320-25-02-П (ГОСТ 17433-80).
МИМП отличается от механизмов типа МИМ более жёсткой пружиной, МИМК – наличием рычага вместо выходного звена.
При установке пневматических ИМ возрастает значимость предмонтажной проверки в связи с тем, что на их демонтаж и замену затрачивается много труда и времени.
Предмонтажная проверка включает проверки: отклонения действительного хода штока, основной погрешности и вариации, порога чувствительности, настройки длины штока.
Для проверки отклонения действительного максимального и условного хода штока через редуктор или задатчик в штуцер головки ИМ подают воздух под давлением 0,02 и 0,1 МПа (0,2 и 1 кгс/см2), которое контролируют по образцовому манометру и проверяют при этом отклонение действительного максимального и условного хода штока.
Поскольку шкала ИМ имеет невысокую точность отсчёта, на шкалу устанавливают индикатор положения, или отклонение определяют по разности между диапазоном изменения входного сигнала (0,02 – 0,1 МПа) и действительным его значением. Для этого, изменяя давление в головке ИМ, устанавливают указатель на отметку 100 % и также фиксируют давление воздуха Р100 в головке ИМ.
Отношение разности максимального действительного и условного хода к условному ходу, т.е.
(Р100 – Р0) – 0,02
∙ 100 %
Х = 0,08
Должно быть не более 40 %.
Если Х больше допустимого, регулируют натяжение рабочих витков пружины ИМ. При (Р100 – Р0) > 0,08 отворачивают зажимную гайку, при
(Р100 – Р0) < 0,08 её заворачивают.
Основную погрешность ИМ, %, при возможности точного измерения хода штока определяют по формуле
γ = (SР - SД) 100/SУ,
где SР, SД и SУ – соответственно расчётное, действительное и условное перемещение штока ИМ, мм.
При невозможности точного измерения хода штока ИМ на вход подают давление в головку ИМ, устанавливают указатель на проверяемую точку и отсчитывают командное давление по образцовому манометру. Расчётное значение давления на проверяемой точке
Рр = [(0,08 SР)/Sу] + 0,02.
Например, для точки 25 %
РР = 0,08 ∙ 0,25 + 0,02 = 0,04 МПа.
Тогда основная погрешность, %,
γ = (РР – РД) 100/0,08,
где Рр и РД расчётное и действительное значения давления, МПа.
Значение основной погрешности также определяют на значениях хода штока соответствующих 40; 75 и 100 % условного хода последовательно при повышении и снижении давления.
Вариацию определяют как отношение наибольшей разности между действительными значениями прямого и обратного хода штока при одном и том же значении командного сигнала к условному ходу, %,
В = (S'Д - S"Д) 100/SУ,
где S'Д, S"Д и SУ – соответственно действительно прямое, действительно обратное и условное значения хода штока, мм, или
В = (Р'Д - Р"Д) 100/0,08,
где Р'Д, Р"Д – прямое и обратное действительные значения давления, МПа. Значение основной погрешности и вариации не должно превышать допускаемой основной погрешности, равной 1,5; 2,5 и 4 % соответственно для клапанов классов точности 1,5; 2,5 и 4,0.
Если погрешность и вариации выше допускаемых значений, проверяют по возможности ослабляют затяжку сальника, проверяют и устраняют механические повреждения штока (искривления, заусеницы, царапины).
Порог чувствительности определяют при 20,50 и 80 % значения командного сигнала (полного диапазона) как при его увеличении, так и при уменьшении. Для определения порога чувствительности плавно увеличивают (или уменьшают) Рк до момента трогания штока и проводят отсчёт по манометру.
Отношение разности между расчётным значением командного сигнала и Рк в момент трогания штока и диапазона изменения командного сигнала, выраженное в процентах, определяет порог чувствительности. Он должен быть не более 0,4; 0,6 и 1 % соответственно для механизмов класса точности 1,5; 2,5 и 4.
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды