Автоматизация системного проектирования
На основании F строки полученной симплекс таблицы, выпишем выражение функции
F = 165/2 -9/8 x3 -3/2 x5
Учитывая, что все x i ≥0 по условию задачи, наибольшее значение функции равно свободному члену 165/2.
Другими словами, учитывая правило формирования симплекс таблицы, критерием получения оптимального решения является отсутствия отрицательных элементов в строке F ( свободный
член может быть отрицательным). Что мы непосредственно и получили.
Теперь можем записать ответ.
Ответ :
X опт = ( 5 , 35/4 , 0 , 29/2 , 0 )
Значение функции : F = 165/2
Задание 2. Имитационное моделирование. Сети Петри
2.1 Построить имитационную модель гибкого производственного
модуля
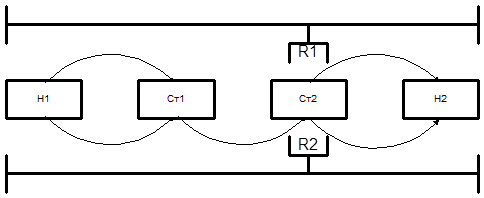
Считаем, что каждый компонент R1, R2, Ст1, Ст2 загружены только одной деталью. Элементы модуля выполняют свои операции независимо друг от друга, R1 (R2) начинает свои транспортировки когда на одном из конвейеров есть деталь. Построить имитационную модель ГПМ.
Решение
Имитационные модели. Основными требованиями к имитационным моделям ГПС являются адекватность модели, максимальная приближенность алгоритмов к методологии объектного программирования и универсальность, как возможность представления всего множества дискретных состояний системы. Использование в имитационном моделировании сетей Петри, как наиболее универсального и часто встречающегося метода формализации имитационных моделей, в большинстве случаев, ограничено построением несложных циклических моделей для роботизированных комплексов и гибких производственных модулей (ГПМ) с обозримым количеством состояния системы. Попытки создания моделей для более сложных систем – гибких производственных участков и комплексов с различным составом многочисленного основного и вспомогательного оборудования, широким спектром номенклатуры деталей ограничивает область применения аппарата сетей Петри в виду большого количества дискретных состояний ГПС, сложности и множественности сетевых структур.
Примером системы позволяющей управлять ГПС может служить пакет моделирования FMSim. Он позволяет размещать в различных позициях планировки любое количество гибких производственных систем , транспортных систем, складов и строить модели расписаний для различных компоновок. При моделировании ГПС данным образом можно выделить следующие особенности:
1) за счет свойства масштабирования сети во времени появляется возможность анализа состояния всех объектов на любом разрезе сети;
2) возможность создания сетей любой сложности и размерности, как функции от времени и количества полюсов сети, представляющих собой ЕП;
3) возможность моделирования на уже созданной сети в пределах любых интервалов времени, с различных, интересующих проектанта событий;
4) возможность оценки расписаний работы ГПС;
5) максимальная приближенность логики синтеза сетей к логике построения программного обеспечения;
6) возможность использования модульной структуры программного обеспечения процесса моделирования.
Последовательность взаимодействия элементов:
1. Перемещение детали с конвейера Н1 роботом-манипулятором R1 и перенос на станок Ст1.
2. Перемещение детали от станка Ст1 до станка Ст2 роботом-манипулятором R2.
3. Перемещение детали от Ст2 на конвейер Н2 роботом-манипулятором R2.
4. Получение метки об окончании выполнении операций по перемещению детали.
5. Возобновление процесса перемещения деталей от конвейера Н1 к конвейеру Н2.
Строим имитационную модель необходимого прямого управления (Рис.1).
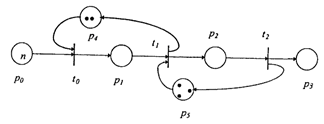
Рис.1. Имитационная модель необходимого прямого управления
Сеть Петри, которая обеспечивает необходимое прямое управление показана на рисунке. Понятно, что в месте р1 не может накопится более одной детали, при любых переходах системы. t0, t1, t2 - время переходов системы. Система безопасна, т.к. операции не выполняются параллельно. Только после выхода детали на конвейер – начинается обработка следующей детали. Хотя было бы рационально использовать обработку на станке Ст1 и параллельно с ней вести обработку другой детали на станке Ст2. При этом увеличилась бы производительность выпуска деталей. Тогда последовательность операций была бы такая:
1. Перемещение детали от конвейера H1 к станку Ст1 роботом R1.
2. Перемещение детали от станка Ст1 к станку Ст2 роботом R2.
3. Получение метки на перемещение следующей детали от конвейера H1 к станку Ст1 роботом R1.
4. Перемещение детали от станка Ст2 к конвейеру Н2 роботом R1.
5. Получение метки на перемещение роботом R2 детали от станка Ст1 к станку Ст2.
Но по условию задания система загружена одной деталью.
Задание 3. Методы постановки задач и алгоритмы автоматизированного проектирования средств вычислительной техники
3.1 Выбрать схему электрическую принципиальную
Выбираем схему
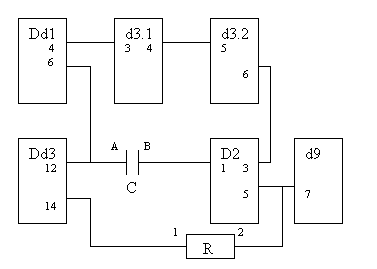
Рис.2. Принципиальная электрическая схема устройства
3.2 Провести формализацию и, используя два алгоритма (последовательно-групповой и алгоритм Штейнберга), провести размещение микросхем на печатной плате.
На этапе конструкторского проектирования решаются вопросы, связанные с компоновкой элементов логической схемы в модуле, модулей в ячейки, ячеек в панели и т.д. Эти задания в общем случае тесно связаны между собой, и их решение позволяет значительно сократить расходы и трудоемкость отмеченного этапа в системах автоматизированного проектирования. Обычно задания компоновки рассматриваются как процесс принятия решений в определенных или неопределенных условиях, в результате выполнения которого части логической схемы располагаются в конструктивных элементах і-го уровня, а эти элементы размещаются в конструктивных элементах (i+1)-го уровня и т.д., причем расположение выполняется с оптимизацией за избранным критерием.
Электрические схемы РЕА в общем случае представляют собой конструктивно законченные части высшего уровня, что состоят из элементов более низкого конструктивного уровня соответственно избранному критерию. Основным критерием объединения является критерий электромагнитотепловой совместимости элементов более низкого уровня.
Такими критериями могут быть:
- минимум типов конструктивно законченных частей;
- плотность компоновки, минимум соединений между устройствами;
- простота диагностики и др.
Основным этапом при решении конструкторских заданий служит переход от неформальной постановки к формализированному заданию. В целом этот этап представляет собой выделение списка кругов из принципиальной схемы ЭА.
Список кругов формируется в виде текстового файла с обязательным перечислением всех соединений следующего вида:
<Название элемента> <Номер контакта> <Название элемента> <Номер контакта> .
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности