Расчет и исследование динамических показателей и показателей качества двухконтурных систем автоматического управления
![]()
Перерегулирование системы при частоте среза
![]()
При исследовании системы, оптимизированной по симметричному оптимуму, будем представлять внутренний контур как апериодическое звено первого порядка с постоянной регулированияidth=76 height=25 src="images/referats/12356/image109.png">с, т.е. по упрощенной схеме САР.
Чтобы получить систему с передаточной функцией ![]() , нужно чтобы передаточная функция второго регулятора представляла собой выражение
, нужно чтобы передаточная функция второго регулятора представляла собой выражение
![]()
где ![]() - передаточная функция регулятора по техническому оптимуму.
- передаточная функция регулятора по техническому оптимуму.
Для уменьшения перерегулирования при управляющем воздействии в такой системе перед входом ставят фильтр с передаточной функцией
![]()
В соответствии с этими положениями строим структурную схему САР представленную на рисунке 19. Структурная схема САР, оптимизированной по симметричному оптимуму
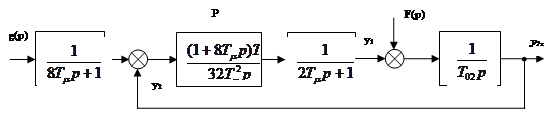
Рис. 19
Также параллельно будем рассматривать САР с минимальным показателем колебательности, у которой передаточной функция регулятора

4.2 Расчет и построение ЛАЧХ и ЛФЧХ разомкнутой САР
4.2.1 Система, построенная по симметричному оптимуму, без фильтра
Передаточная функция разомкнутой САР построенной по симметричному оптимуму

Т.к. разомкнутая САР содержит два интегральных, дифференцирующее и инерционное звено, то

![]()
Передаточная функция замкнутого контура
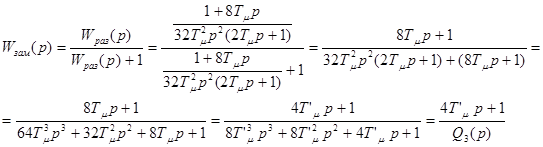
где Т’μ=2Tμ=2·0,02=0,04c - постоянная времени внутреннего контура; Q3 (р) - знаменатель оптимальной передаточной функции, построенной по техническому оптимуму.
4.2.2 Система, построенная по симметричному оптимуму, с фильтром
Используя выражения, выведенные в п.4.2.1 определим передаточную функцию САР с фильтром на управляющем входе
![]()
Следовательно, фильтр компенсирует дифференцирующее звено регулятора внешнего контура. Исходя из этого ЛАЧХ и ЛФЧХ
![]()
![]() 4.2.3 Система с минимальным показателем колебательности
4.2.3 Система с минимальным показателем колебательности
Передаточная функция разомкнутой САР построенной по симметричному оптимуму с минимальным показателем колебательности

Т.к. разомкнутая САР содержит два интегральных, дифференцирующее и инерционное звено, то

![]()
4.2.4 Расчет и построение ЛАЧХ и ЛФЧХ разомкнутых САР
Используя выражения для ЛАЧХ и ЛФЧХ разомкнутых САР, рассчитаем и построим кривые логарифмических частотных характеристик. Данные расчета ЛФЧХ представлены в таблице10. Учитывая то, что системы без фильтра и с минимальным показателем колебательности имеют одинаковые ЛФЧХ, обозначим ее как φ (ω) - м. к. Расчет ЛФЧХ разомкнутых систем.
Таблица 10
![]()
ЛАЧХ и ЛФЧХ разомкнутых систем
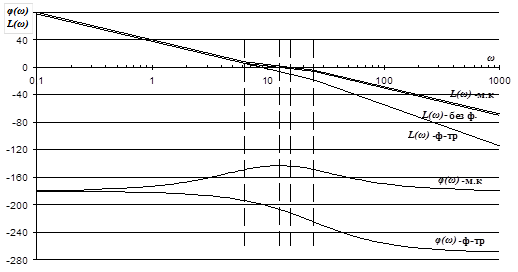
Рис. 20
4.2.5 Связи между прямыми показателями качества и частотными характеристиками
По виду ЛАЧХ и ЛФЧХ можно судить:
1) Система устойчива, если при частоте среза ЛФЧХ меньше 180˚, запас по фазе больше нуля;
2) Время регулирования системы обратно пропорционально частоте среза
![]() ;
;
3) Система устойчива, если запас по амплитуде больше нуля, при частоте достижения ЛФЧХ значения 180˚;
4) Если при частоте среза наклон ЛАЧХ больше - 20 дБ/дек, то система устойчивая;
5) Для устойчивости необходим диапазон с наклоном - 20 дБ/дек не менее одной декады;
6) По низкочастотной части ЛАЧХ можно судить о статизме системы. Если наклон 0 дБ/дек, то система статическая, если - 20 дБ/дек, то система первого порядка статизма, а если - 40 дБ/дек - второго порядка статизма.
4.3 Произвести аналитический расчет переходных процессов САР
4.3.1 Расчет переходных процессов
Управляющее воздействие
Используя передаточные функции из п.4.2, находим переходные функции по управляющему воздействию.
Система, построенная по симметричному оптимуму (без фильтра)
Передаточная функция при управляющем воздействии, когда выходом является выход внешнего контура регулирования: yвх=g (p), yвых=y2
![]()
Используя обратное преобразование Лапласа, найдем передаточную функцию по управляющему воздействию для выходной величины внешнего контура
![]()
где ![]() - переходная функция оптимального процесса, для передаточной функции третьей степени;
- переходная функция оптимального процесса, для передаточной функции третьей степени;
![]() - производная этой функции.
- производная этой функции.

Для выходной величины внутреннего контура
![]()

Система, построенная по симметричному оптимуму с фильтром.
Передаточная функция при управляющем воздействии, когда выходом является выход внешнего контура регулирования
![]()
Переходный процесс будет оптимальным

Передаточная функция по управляющему воздействию для выходной величины внутреннего контура
![]()

Для системы с минимальным показателем колебательности стоить кривые переходного процесса не будем по причине сложности вывода переходной функции.
Другие рефераты на тему «Программирование, компьютеры и кибернетика»:
Поиск рефератов
Последние рефераты раздела
- Основные этапы объектно-ориентированного проектирования
- Основные структуры языка Java
- Основные принципы разработки графического пользовательского интерфейса
- Основы дискретной математики
- Программное обеспечение системы принятия решений адаптивного робота
- Программное обеспечение
- Проблемы сохранности информации в процессе предпринимательской деятельности