Анализ САР регулирования частоты вращения приводного электродвигателя стенда для обкатки ДВС
Получаем

Результаты расчета сводим в табл. 2.
Таблица 2. Результаты расчета для построения АФЧХ.
|
|
0 |
0,005 |
0,01 |
0,05 |
0,08 |
0,1 |
0,15 |
0,2 |
0,6 |
0,8 |
|
|
5 |
4,93 |
4,764 |
1,895 |
0,539 |
0,0684 |
-0,41 |
-0,5 |
-0,15 |
-0,087 |
|
|
0 |
-0,596 |
-1,158 |
-2,954 |
-2,511 |
-2,115 |
-1,32 |
-0,82 |
-0,02 |
0,009 |
5.3 Определяем запас устойчивости САР:
Запас устойчивости по амплитуде для данной САР ![]() =0,82 , по фазе -
=0,82 , по фазе - ![]() , что удовлетворяют рекомендованным величинам запасов устойчивости по амплитуде и по фазе.
, что удовлетворяют рекомендованным величинам запасов устойчивости по амплитуде и по фазе.
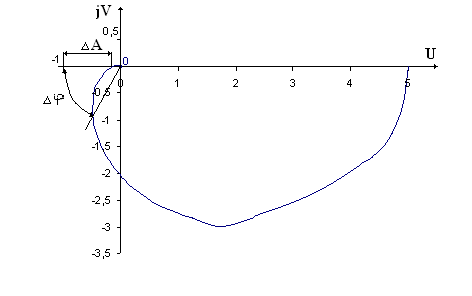
Рис. 4 АФЧХ разомкнутой системы
6. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
При выполнении такого анализа используют передаточную функцию системы для ошибки по управляющему воздействию.
Воспользуемся передаточной функцией для ошибки по управляющему воздействию, полученной в разделе 4 для нашей системы:

В статистике р обращается в ноль, поэтому:
![]()
Таким образом:
![]()
где К - коэффициент передачи разомкнутой системы.
После подстановки численного значения K получим ![]() .
.
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему.
7. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
Воспользуемся передаточными функциями объекта управления и системы по возмущающему воздействию.
![]()

В статике р обращается в ноль, поэтому для объекта:
![]()
![]()
Для системы:
![]()
![]()
После подстановки численных значений параметров получаем зависимость изменения температуры на ОУ от изменения наружной температуры.
![]() - для ОУ без регулятора;
- для ОУ без регулятора;
![]() - для ОУ, снабженного регулятором.
- для ОУ, снабженного регулятором.
Передаточная функция системы для ошибки по возмущающему воздействию:
![]()
Поэтому для нашей системы:
![]()
Таким образом, температура внутри животноводческого помещения без применения САР изменяется также, как и температура наружного воздуха.
При применении САР частота вращения изменяется примерно на 17% при изменении момента на валу. Это свидетельствует о том, что эксплутационные качества обкатки ДВС существенно улучшились.
8. Оценка качества управления по переходным функциям
8.1 Определение перерегулирования
Для переходной функции по управляющему воздействию (Рис. 5):
![]() =
=![]() =19,2%
=19,2%
Для переходных процессов по возмущающему воздействию (Рис. 6)
![]()
![]()
8.2 Быстродействие системы.
Определим интервал времени от начала переходного процесса до момента, когда отклонение выходной величины от ее нового значения становится меньше определенной величины
![]()
Для переходной функции по управляющему воздействию:
![]()
![]() c.
c.
Для переходной функции по возмущающему воздействию:
![]()
![]() c.
c.
8.3 Колебательность переходного процесса
Определяется числом перерегулирования N для переходной функции по управляющему воздействию или числом колебаний N для переходной функции по возмущающему воздействию за время переходного процесса. Для рассматриваемого процесса N=1.
Для переходных процессов, как по управляющему воздействию, так и по возмущающему воздействию
![]()
Но при N=1 ![]() , поэтому для переходных функций
, поэтому для переходных функций ![]() и
и ![]()
8.4 Определение статической ошибки системы по переходной функции
Статическая ошибка по управляющему воздействию:
![]()
Что совпадает с результатом, полученным при ![]()
Статическая ошибка по возмущающему воздействию:
![]()
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды