Кинематический и силовой расчет механизма долбежного станка с качающейся кулисой
4.3 План скоростей для левого крайнего положения
VB3 = (pb3) · μv = 0 · 0,01 = 0 м/с
VB3B2 = VB1 = 0,9 м/с
VC3 = 0; VE = 0
ω2 = ω3 = 0; ω4 = 0
4.4 План скоростей для правого крайнего положения
VB3 = (pb3) · μv = 0 · 0,01 = 0 м/с
VB3B2 = VB1 = 0,9 м/с
VC3 = 0; VE = 0
ω2 = ω3 = 0; ω4 = 0
5. Построение планов ускорений
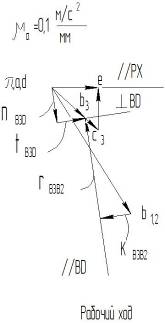
5.1 План ускорений для рабочего хода
аВАτ = 0, т.к. ω1 = const.
аВ1 = аВ2 = аВАn = ![]() = ω12 · lBA =
= ω12 · lBA = ![]() · lBA =
· lBA = ![]() · 0,14 = 5,52 м/с2
· 0,14 = 5,52 м/с2
μа = ![]() =
= ![]() = 0,1
= 0,1 ![]()
аВ3 = аВ2 + аВ3В2к + аВ3В2r
аВ3 = аD + аВ3Dn + аВ3Dt
![]() =
= ![]() = 0,2
= 0,2
аВ3В2к = 2 · ω3 · VB3B2 = 2 · 1,6 · 0,36 = 1,16 м/с2
КВ3В2 = ![]() =
= ![]() · 0,2 = 11,5 мм
· 0,2 = 11,5 мм
nB3D = ![]() =
= ![]() · 0,2 = 13,1 мм
· 0,2 = 13,1 мм
аВ3 = (πb3) · μа = 16,9 · 0,1 = 1,69 м/с2
аВ3Dt = tB3D · μа = 10,7 · 0,1 = 1,07 м/с2
аВ3В2r = rB3B2 · μа = 37,5 · 0,1 = 3,75 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 23,3 мм
= 23,3 мм
аС3 = (πс3) · μа = 23,3 · 0,1 = 2,33 м/с2
_
аЕ = аС3 + аС3E
аС3E = с3е · μа = 15,7 · 0,1 = 1,57 м/с2
аЕ = (πе) · μа = 17,2 · 0,1 = 1,72 м/с2
ε1 = 0
ε2 = ε3 = ![]() =
= ![]() = 2,1 c-2
= 2,1 c-2
ε4 = 0
ε5 = 0
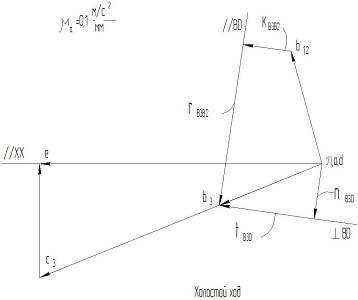
5.2 План ускорений для холостого хода
аВ3В2к = 2 · ω3 · VB3B2 = 2 · 3,15 · 0,36 = 2,27 м/с2
КВ3В2 = ![]() =
= ![]() · 0,2 = 22,9 мм
· 0,2 = 22,9 мм
nB3D = ![]() =
= ![]() · 0,2 = 26,3 мм
· 0,2 = 26,3 мм
аВ3 = (πb3) · μа = 52,2 · 0,1 = 5,22 м/с2
аВ3Dt = tB3D · μа = 45,1 · 0,1 = 4,51 м/с2
аВ3В2r = rB3B2 · μа = 76,8 · 0,1 = 7,68 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 143,8 мм
= 143,8 мм
аС3 = (πс3) · μа = 143,8 · 0,1 = 14,38 м/с2
_
аЕ = аС3 + аС3E
аС3E = с3е · μа = 53,7 · 0,1 = 5,37 м/с2
аЕ = (πе) · μа = 133,4 · 0,1 = 13,34 м/с2
ε1 = 0
ε2 = ε3 = ![]() =
= ![]() = 17,3 c-2
= 17,3 c-2
ε4 = 0
ε5 = 0
5.3. План ускорений для левого крайнего положения.
_
аВ3 = аВ3Dt = аВАn
аВ3 = 5,52 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 107,6 мм
= 107,6 мм
аС3 = (πс3) · μа = 107,6 · 0,1 = 10,76 м/с2
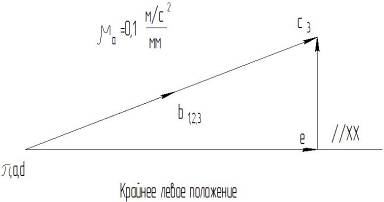
аС3E = с3е · μа = 38,6 · 0,1 = 3,86 м/с2
аЕ = (πе) · μа = 100,4 · 0,1 = 10,04 м/с2
ε2 = ε3 = ![]() =
= ![]() = 15,3 c-2
= 15,3 c-2
5.4 План ускорений для правого крайнего положения
аВ3 = аВ3Dt = аВАn
аВ3 = 5,52 м/с2
![]() ; (πс3) =
; (πс3) = ![]() =
= ![]() = 107,6 мм
= 107,6 мм
аС3 = (πс3) · μа = 107,6 · 0,1 = 10,76 м/с2
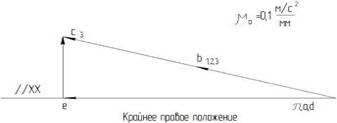
аС3E = с3е · μа = 38,6 · 0,1 = 3,86 м/с2
аЕ = (πе) · μа = 100,4 · 0,1 = 10,04 м/с2
ε2 = ε3 = ![]() =
= ![]() = 15,3 c-2
= 15,3 c-2
6. Кинетостатический расчет механизма
6.1 Определение сил инерции и сил тяжести звеньев
Силы тяжести ![]() ,
, ![]() приложены в центрах масс S3, S5 звеньев и направлены вертикально вниз. Рассчитаем модули этих сил:
приложены в центрах масс S3, S5 звеньев и направлены вертикально вниз. Рассчитаем модули этих сил:
G3 = m3 · g = 22 · 9,8 = 216 H
G5 = m5 · g = 26 · 9,8 = 255 H
При определении сил инерции и моментов сил инерции воспользуемся построенным планом ускорений для нахождения ускорений центров масс звеньев.
![]() ; (πs3) =
; (πs3) = ![]() =
= ![]() = 11,5 мм
= 11,5 мм
аS3 = (πs3) · μа = 11,5 · 0,1 = 1,15 м/с2
aS5 = aЕ = 1,72 м/с2
Теперь рассчитаем модули сил инерции.
Звено 3 совершает вращательное движение.
FИ3 = m3 · aS3 = 22 · 1,15 = 25,3 H
MИ3 = JS3 · ε3 = 0,4 · 2,1 = 0,84 H · м
Звено 5 совершает поступательное движение.
FИ5 = m5 · aS5 = 26 · 1,72 = 44,72 Н
Сила инерции FИ3 приложена в центре масс S3 звена 3 и направлена противоположно ускорению аS3. Сила инерции FИ5 приложена в центре масс S5 звена 5 и направлена противоположно ускорению аS5. Момент сил инерции MИ3 по направлению противоположен угловому ускорению ε3.
6.2 Определение реакций в кинематической паре 4-5
|
№ |
Что определяется |
Каким уравнением |
Для какого звена |
|
1. |
|
|
4, 5 |
|
2. |
|
|
4 |
|
3. |
|
|
5 |
|
4. |
|
|
4 (или 5) |
Другие рефераты на тему «Производство и технологии»:
Поиск рефератов
Последние рефераты раздела
- Технологическая революция в современном мире и социальные последствия
- Поверочная установка. Проблемы при разработке и эксплуатации
- Пружинные стали
- Процесс создания IDEFO-модели
- Получение биметаллических заготовок центробежным способом
- Получение и исследование биоактивных композиций на основе полиэтилена высокой плотности и крахмала
- Получение титана из руды